




























Corrine Rojas Sarah FagentsSamantha Jacob • March 16, 2020
At a Glance
- NASA’s Perseverance rover will land near an ancient Mars river delta, which could have contained life.
- Scientists divided the region into a 342-block grid and mapped roughly half using images and data from orbital spacecraft.
- The maps will help the mission team safely navigate the rover and plan scientific field trips.
How do you prepare for a road trip? On Earth, you can just type in a destination on your smartphone and start driving. On Mars, there’s no GPS or roads—only images and data provided by orbiting spacecraft.
NASA’s Perseverance rover launches in late July or early August and will arrive on Mars in February 2021. The rover will land near an ancient river delta. Deltas form as rivers deposit sediment from upstream sources into standing bodies of water, like lakes or oceans. On Earth, these areas tend to teem with life. The Perseverance rover will search for signs of past life while collecting soil and rock samples for future return to Earth.

NASA Ames/USGS/JPL/Corrine Rojas
Jezero Crater in global context
Jezero crater is located at the northeastern edge of a volcanic region on Mars known as Syrtis Major.

ESA / DLR / FU Berlin / Emily Lakdawalla
Perseverance rover landing ellipse in Jezero crater
Jezero crater is 45 kilometers in diameter. The Perseverance rover landing site will be on the flat floor of the crater, just east of a dramatic ancient river delta.

Perseverance Rover Mastcam-Z Partnership
The Planetary Society is an education and outreach partner for the Mastcam-Z instrument on NASA’s Perseverance rover. We feature stories from the team sending this cutting-edge camera system to Mars.
How do you safely drive a Mars rover around an ancient river delta while planning scientifically interesting places to perform fieldwork and collect samples? For starters, you need good maps, built using images and data collected by spacecraft in orbit. Unfortunately, our previous maps of Jezero crater have very large scales and don’t show the kind of detail we’ll need for day-to-day trip planning. Here’s an example: notice the one kilometer scale mark in the lower-right corner, and you’ll see why regional maps like this are not so suitable for planning rover activities!
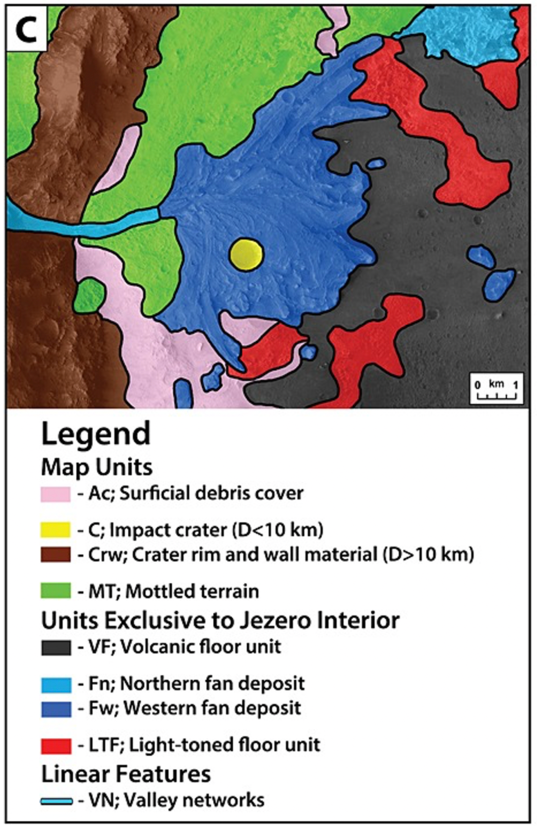
Goudge et al. (2015)
Previous Regional Map of Jezero Crater
This map from Goudge et al. 2015 shows an example of a previous regional geologic map of the Perseverance rover’s Jezero crater landing area.
To level up our mapping game, a subset of the Perseverance rover science team formed a mapping group in mid 2019. The dozens of volunteer mappers included people in all stages of their careers, from first-time mappers and rover newbies to senior planetary scientists with decades of experience with rover missions. The team was led by geologic mapping specialists at NASA’s Jet Propulsion Laboratory (JPL) in Pasadena, California.
It’s worth mentioning that this process had benefits beyond navigating the rover and planning scientific field trips. Another important objective was team building and creating a sense of investment in our rover’s future home!

Perseverance
NASA’s Perseverance rover will seek signs of life in Jezero crater, and store samples for future return to Earth.
How to map a Mars river delta
The JPL mapping specialists first laid a grid of 1.2 by 1.2 kilometer (0.75 by 0.75 mile) blocks over the landing zone and surrounding region, giving us distinct blocks—which we call quads—to map.
Spanning the quads are 7 distinct geographic regions—different surface types like delta, crater floor, and crater rim—each of which was assigned 2 or 3 mapping leads. The leads coordinated mapping of the individual quads in their areas and also coordinated with one another to ensure consistency and continuity across the entire grid.
Each quad received an informal name to make it easier to keep track of them. The Perseverance rover science team is an international conglomerate of scientists and engineers, so we chose a naming theme of parks and preserves from around the world. During the actual mission, this will also help us choose informal names for rocks and features the rover studies.
To map each quad, we started with a base map of high-resolution images from Mars orbiters and added to that topography and slope maps showing changes in elevation as well as false-color maps showing differences in surface mineralogy.
By using these different data sets, we were able to identify and distinguish different rock types, such as delta sediments versus the crater floor, and surface types, such as fractures versus dunes. We charted hills, river channels, impact craters, and fractures caused by tectonism. All those subtle differences within each quad amount to a lot of drawing lines and shapes on a map!
Here’s an example of how one quad came together over time:
NASA/JPL/University of Arizona/Corrine Rojas
Saguaro quad in Jezero crater
This animation shows the evolution of the mapping of the Saguaro quad in Jezero crater.
We finished all the quads in September 2019, and the JPL mapping specialists have since been working to ensure consistency in the way everything is stitched together across the entire grid. Here’s the preliminary result:
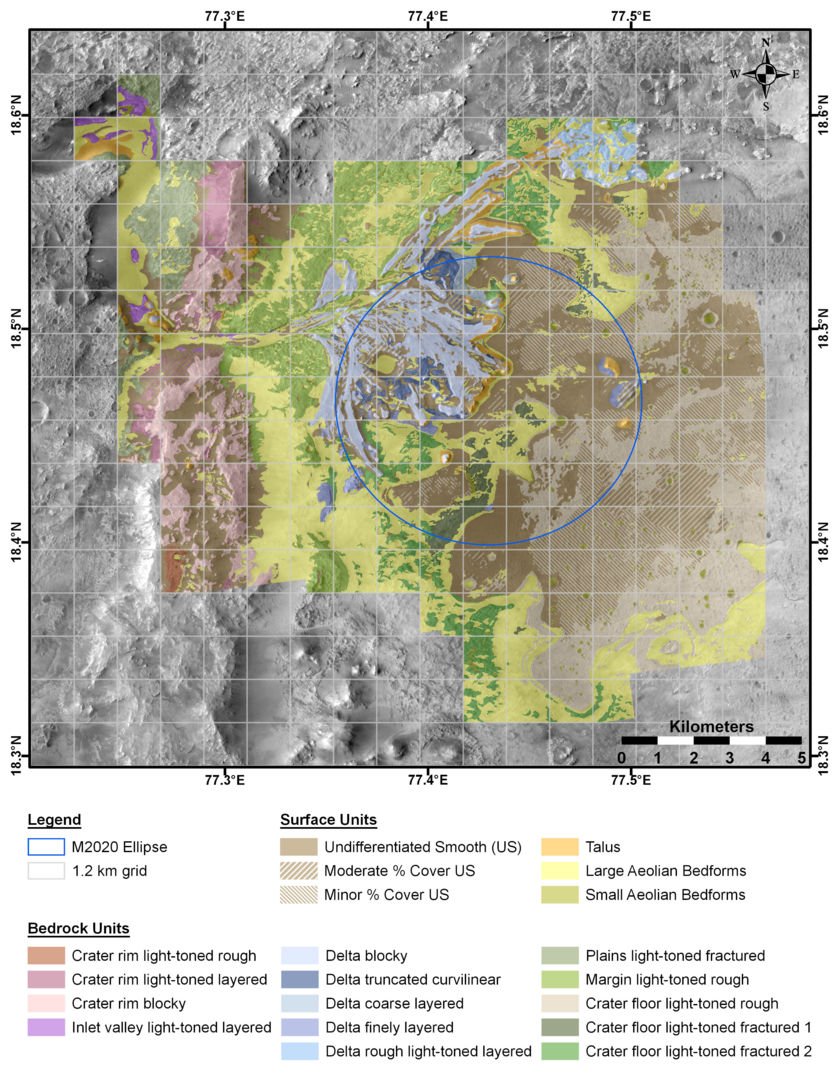
Williams et al. (2020)
Early 2020 geologic map of Jezero crater
This image from Williams et al. (2020) shows the early 2020 version of the Perseverance rover mapping team’s geologic map of Jezero crater. Note that only selected regions of the original 342-block grid were mapped.
This map is part of a paper that is in preparation for peer review; initial results will be presented at the fifty-first Lunar and Planetary Science Conference in Houston in March. The conference presentation and paper will also offer some hypotheses for the origin of the region’s features, some thoughts on rover-sampling strategies, and future planning of rover objectives.
Personal Perspectives
It takes thousands of scientists and engineers to prepare the Perseverance rover for landing, to operate it upon arrival, and to interpret the images and other data that will be sent back to Earth. The 3 authors of this article had different perspectives going into this mapping project, so we’d like to conclude by providing a taste of our individual thoughts and experiences.

Corrine Rojas
Corrine Rojas
Corrine Rojas: I am a payload downlink lead for the Perseverance rover Mastcam-Z instrument at Arizona State University. I have a bachelor of science degree in geography, but I haven’t done any formal geologic mapping for any worlds besides Earth. I was excited to be a part of this project since team members of all levels were encouraged to participate. I wanted to go above and beyond my duties as a camera operator and learn more about the rover’s future home.
As a native Arizonan, it didn’t take me long to create a personal connection with this project. Several quads are named after Arizona parks, including the Grand Canyon National Park, the Petrified Forest, and Canyon de Chelly National Monument. I submitted 2 other names that were accepted: Saguaro, named after the Saguaro National Park next to Tucson, Arizona: and Red Rock, after Red Rock State Park in Sedona, Arizona. Sedona is one of my favorite places on this planet. The red rocks there are stunning and reminiscent of the Martian landscape as seen through the eyes of previous Mars rovers.
Sedona’s famous iron-oxide-rich red sandstone rocks (left) are great visual analogs for the sandstone formations scattered around Mars, like Marias Pass, as imaged here by NASA’s Curiosity rover. The pristine features on Mars remain sharp and jagged, mostly due to the much lower rates of erosion on Mars.
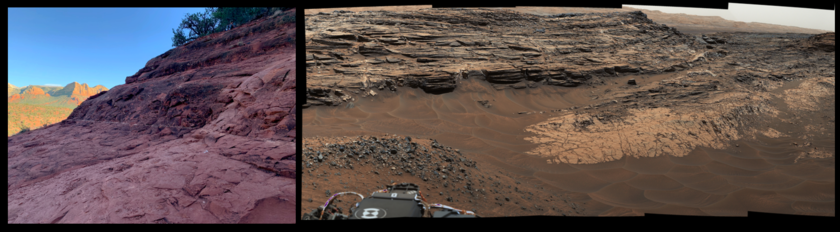
Corrine Rojas (left); NASA/JPL-Caltech/Malin Space Science Systems mosaic (right)
Arizona and Mars
Sedona’s famous iron-oxide-rich red sandstone rocks (left) are great visual analogs for the sandstone formations scattered around Mars, like Marias Pass, as imaged here by NASA’s Curiosity rover. The pristine features on Mars remain sharp and jagged, mostly due to the much lower rates of erosion on Mars.
Arizona is a wonderland for geologists. I felt that the national park name theme and those selected for quad names served as a little love note to our state’s natural beauty and Mars-like landscape. It brought an unexpected emotional tie and pride to my mapping work.
I had the most fun mapping the Saguaro quad, the process of which was illustrated in an animation earlier in this article. Saguaro quad lies within what could be part of the shoreline of the ancient lake in Jezero crater. It has many small features that can be overlooked at this scale. For example, in the upper-left corner is a dark blob that looks smooth, but when you zoom in, you can see hundreds of small sand dunes that would be interesting to study up close. All of the dunes, mesas, and craters in Saguaro quad would make it a challenge to drive through with a rover, but it’s certainly beautiful to look at from orbit!

Samantha Jacob
Samantha (Sammie) Jacob
Samantha (Sammie) Jacob: I am a PhD graduate student at Arizona State University working with Jim Bell, who is the principal investigator for the Mastcam-Z instrument and the president of The Planetary Society’s Board of Directors. I have been part of the Curiosity rover science team since it landed in 2012.
Because of my extensive background in planetary geologic mapping, I volunteered to be a mapping lead for one of the 7 geographic areas that overlay the quads. I also mapped 4 quads: Vatnajökull (named after a glacier and national park in Iceland), Pipestone (named after a national park and monument in Minnesota), Femundsmarka (named after a national park in Norway), and Hawaiʻi Volcanoes (named after the Hawaiʻi Volcanoes National Park). I submitted the name for Hawaiʻi Volcanoes because it’s a place I have spent many wonderful days exploring.
By the time I joined the Curiosity team, the landing site, Gale crater, had already been selected and mapped, so it was fun to get involved in mapping for the Perseverance rover mission at an earlier phase of the project. As a mapping lead, it was also a great opportunity to help guide other mappers in their techniques and work together as a team to discuss different opinions and challenges that came up during the process.

Jamie Wallace
Sarah Fagents
Sarah Fagents: I’m a faculty member at the University of Hawaiʻi at Mānoa and a coinvestigator for Mastcam-Z. I’m also a volcanologist interested in understanding how eruptive processes form volcanic deposits on different planets.
Although somewhat farther down my career path than Corrine and Sammie, this is the first time I have participated in a rover mission. Fortunately, I was surrounded by many wonderful teammates who have worked on Mars rover missions for years—in some cases, decades! Sometimes, I felt like a wide-eyed new kid showing up to class halfway through the school year. Nevertheless, I was keen to apply my decades of remote sensing, modeling, and field experience to the process.
I mapped 2 quads: Lake District, named after a wet and rugged national park in England that is close to my ex-pat British heart, and Nahanni, a spectacular mountainous park in the Northwest Territories of Canada. Having spent many happy years hiking around the Lake District in my youth, I was excited to get to grips with its namesake on Mars.
The Martian Lake District is quite different from the terrestrial one. Not being a particularly experienced mapper, I found it quite a challenge to distinguish the subtle variations in this relatively featureless portion of Jezero crater. I spent many blurry-eyed hours drawing and redrawing lines marking the differences between areas, with descriptors such as rough, semirough, semismooth, mottled, and smooth. This exercise helped me develop a profound appreciation of the skills and patience of planetary mappers who take on much larger projects!
Acknowledgements
The authors thank JPL Perseverance rover scientists Katie Stack and Nathan Williams for reviewing an earlier draft of this post and for providing a high-resolution version of the team’s current Jezero geologic map. We also thank the entire Perseverance rover mapping team for all of their hard work and insights as we get ready to rove in Jezero!
References
Goudge, T.A., J.F. Mustard, J.W. Head, C.I. Fassett, and S.M. Wiseman. “Assessing the Mineralogy of the Watershed and Fan Deposits of the Jezero Crater Paleolake System, Mars.” J. Geophys. Res. 120 (2015): 775-808.
Williams, N.R., K.M. Stack, F.J. Calef III, V. Sun, K. Williford, K. Farley, and the Mars 2020 Geologic Mapping Team. “Photo-geologic Mapping of the Mars 2020 Landing Site, Jezero Crater, Mars.” Abstract #2254. 51st Lunar and Planetary Science Conference, Houston, TX (2020).


















{kind=link}